
글쓴이 : SOONDORI
돌고 돌아서 물리적인 원인을 찾았는데, 눈 나쁜 사람에게 아주 멀리 떨어진 과녁의 정중앙을 맞히라고 한다. 헛! 감각적으로 가늠해 보면, 0.3mm 이하의 위치 변화가 큰 차이를 만들어 낸다.
* 관련 글 : 금성사 GCD-606 CDP 탐구하기 (22), 레이저 광원의 정렬 #1
언제나 그렇듯 사전 궁리를 해 보고… 그것을 정리하면,
■ <메인 수광센서> IC 정보
일본에 현물 <메인 수광센서> 재고가 있다는, 믿거나 말거나 인터넷 단서가 있음.
(출처 : https://wakamatsu.co.jp/biz/user_data/products_view.php?cate_id=1912)
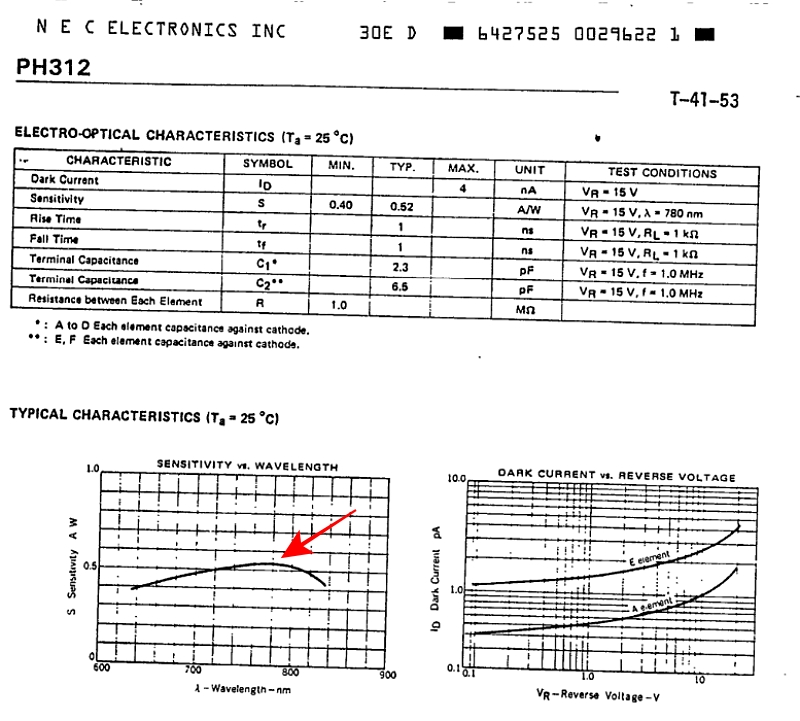
검색해 보니… 1987년의 PH302C IC, 1990년의 PH306 IC가 있지만, 그러면 그렇지… 1980년대 초중반에 소개되었을 것으로 짐작하는 PH306C의 정보는 없다. 더 검색하고, 가장 근접한 속성을 가진 NEC PH312 데이터시트를 다운로드.
데이터 시트의 작성 스타일이 1980년대 초반에 걸맞다. 충분히 오래된 것.
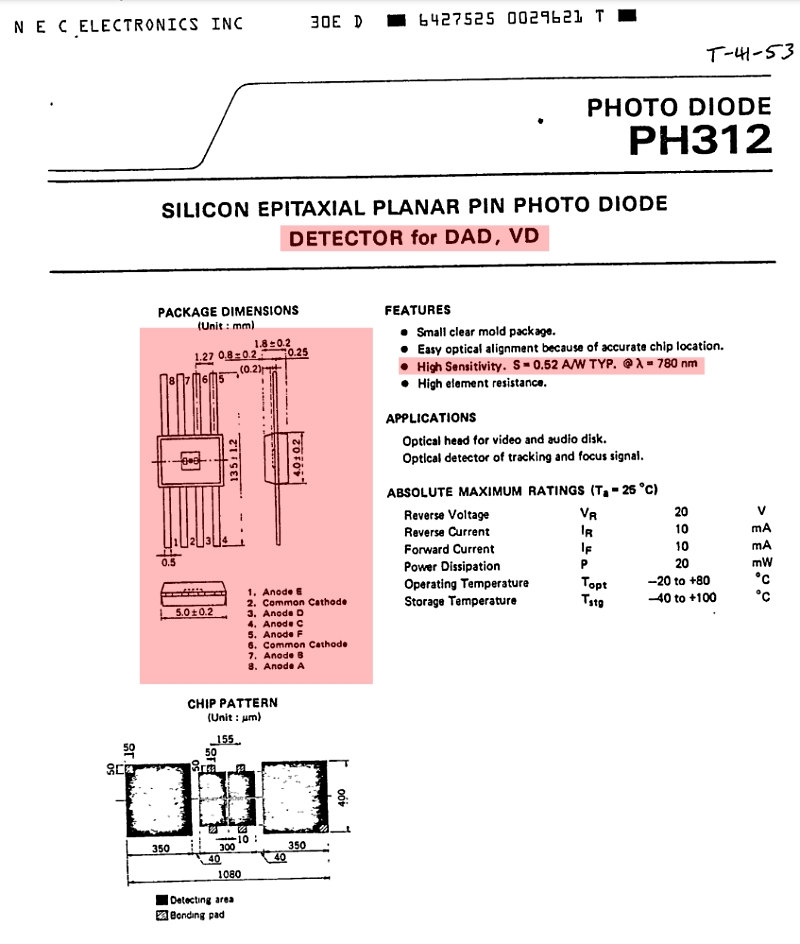
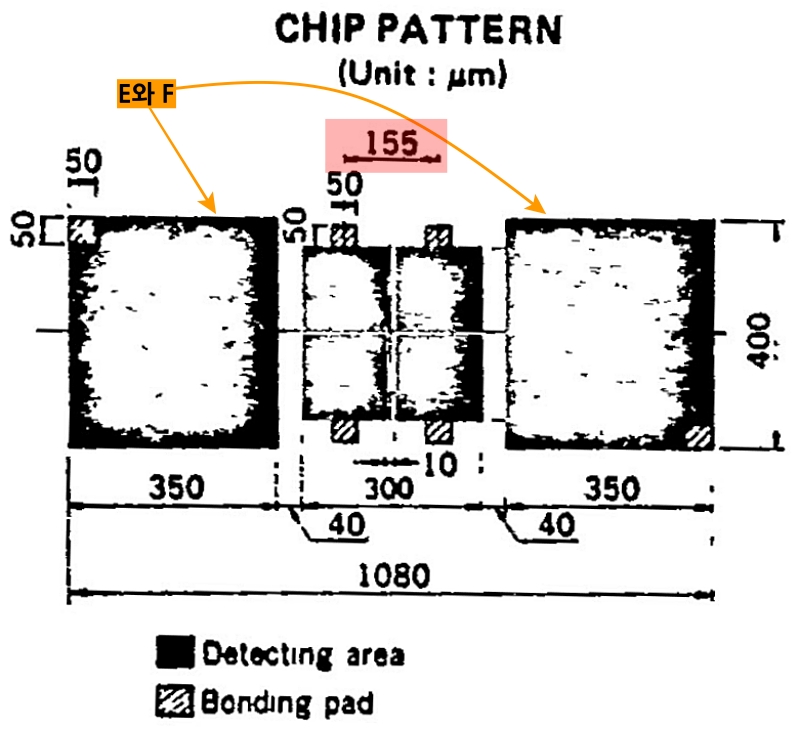
타겟 하나의 크기가 150um × 150um.
그리고 그것의 안쪽에 실물 반도체 레이어가 깔려 있고 그 레이어가 또 몇 등분되어 있으니… 역시, 표준 광원과 돋보기 카메라를 포함할 공장 캘리브레이션 장비는 필수.
그나마 다행인 것은…
1) <RF 보드>에서 병렬 경로를 구성했다는 것이다. “아무거나 걸려라!” 초기 광원이 A/B/C/D 센서에 어떻게든 닿으면 그만이다,
2) 그렇게, 마이크로컨트롤러가 “뭔가 있다”고 판단만 하면, 무조건 스핀들 모터가 돌고… Focus 보정 및 Track 보정 기능이 작동하면서 CDP가 알아서 픽업 모듈 렌즈의 3차원 위치를 설정할 것.
1980년대의 필립스와 소니가, 그런 자동 보정 기능을 생각하지 않고 오로지 픽업 모듈의 물리적 정렬에만 기댔을 것 같지는 않음. 왜냐하면, 그러면 진짜 바보들의 설계가 되니까. 더하여, 디지털 신호를 담은 피트(Pit) 및 나머지 공간에 일괄 반짝이 처리가 되어있다는 것도 큰 도움이 된다.
아무려나, 레이저 광이 반짝이 면을 맞고 튕겨 나와 세그먼트 센서 A/B/C/D 중 하나에, 그저 적당한 강도로 닿기만 하면 만사 오케이라는 시나리오를 상상해 보았다.
(시간 흐른 후)
■ 정렬 기준점의 설정
현재 상황에서,
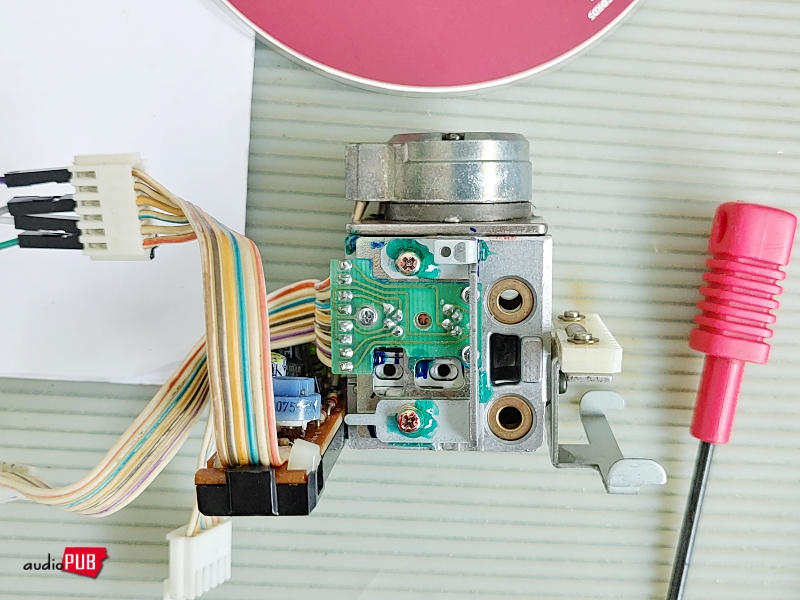
1) PIN 다이오드는 케이스에 잘 고정된 상태 → “혹시 3개 나사가 3점식 각도 조정용일까?” 처음에는 그렇게 상상했는데, 그 작은 볼트로는… 완전히 넌센스.
2) 각종 렌즈와 프리즘이 들어간 금속 하우징은… 달리 만지작거릴 게 없음.
3) 그 하우징에 붙는 <렌즈 구동 어셈블리> 뭉치가 3개 나사로 고정되는데, 그것 역시 미세 조정용이 아니다 → 적당히, 단단히 고정함.
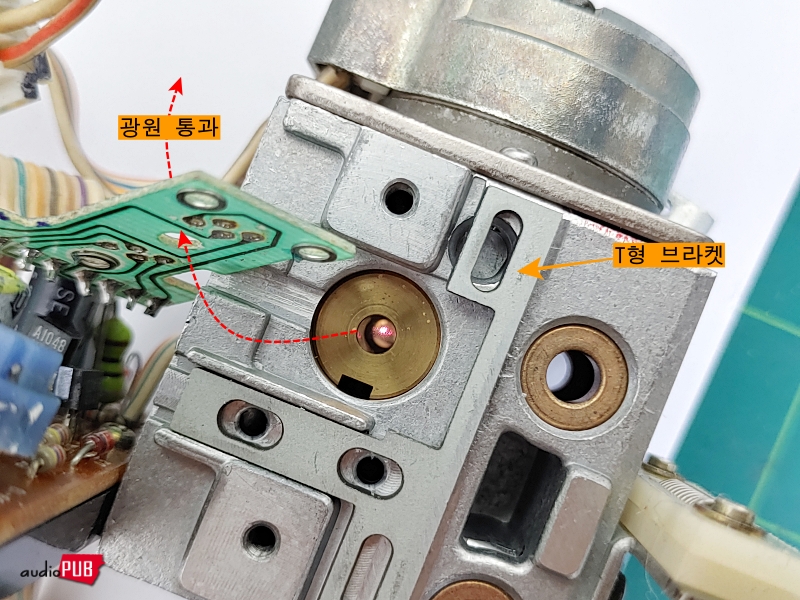
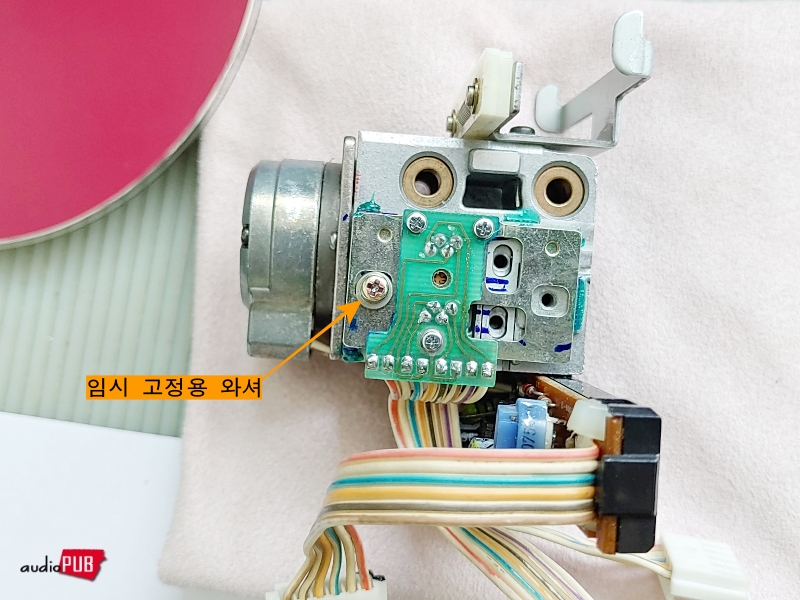
4) 남은 것은… <메인 수광센서>가 마운트 된 보드와 금속 브라켓뿐이다. (여기서, 왜 굳이 <T자형 금속 구조물>을 섰는지가 궁금하다. 이유가 있을 것인데… 나중에 생각해 보기로 함)
아무튼, 아래 절차대로 최초의 위치를 설정하였다.
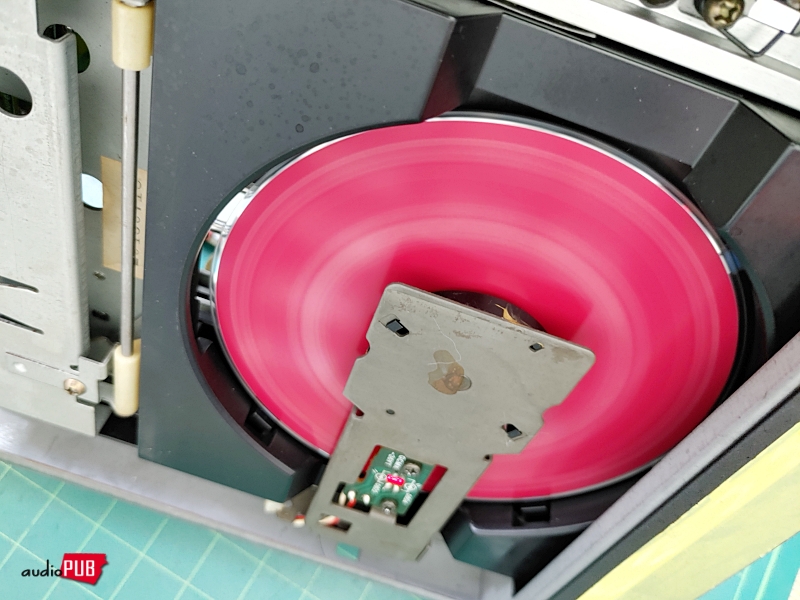
<메인 수광센서> 보드에서 포토 센서 IC를 잠시 제거한다 → CD를 렌즈에 근접한 상태로, 보드 중앙부 구멍에 붉은빛이 잘 보이도록 보드 위치를 조정 + 펜으로 외곽선 마킹 → IC를 다시 마운트.
논리는, 과녁에 근접한 조건으로 대략적인 위치를 잡고 다시 미세 조정하겠다는 것.
(시간 흐른 후)
■ <메인 수광센서>의 미세 정렬 작업
30분 동안 Try & Error 정렬한 결과는 다음과 같다.
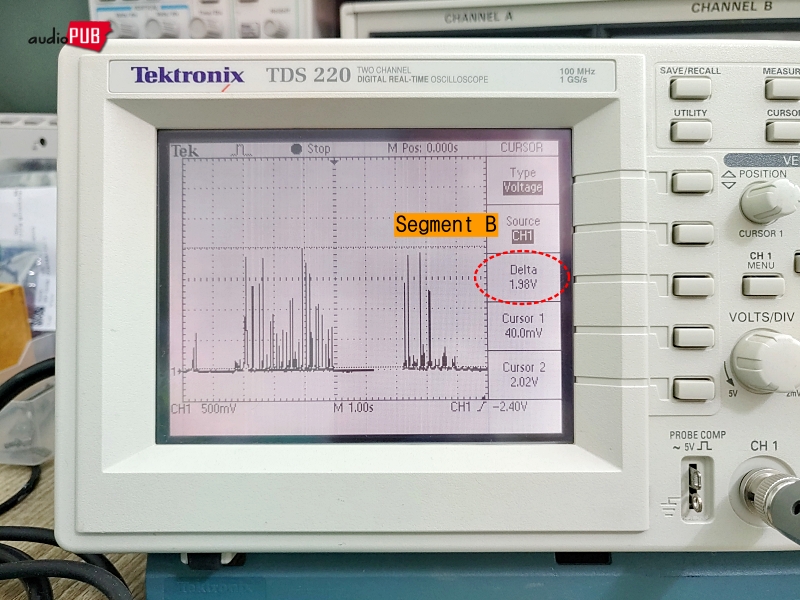
1) 세그먼트 센서 A와 B : 상황에 따라 2V를 훌쩍 넘어가기도…
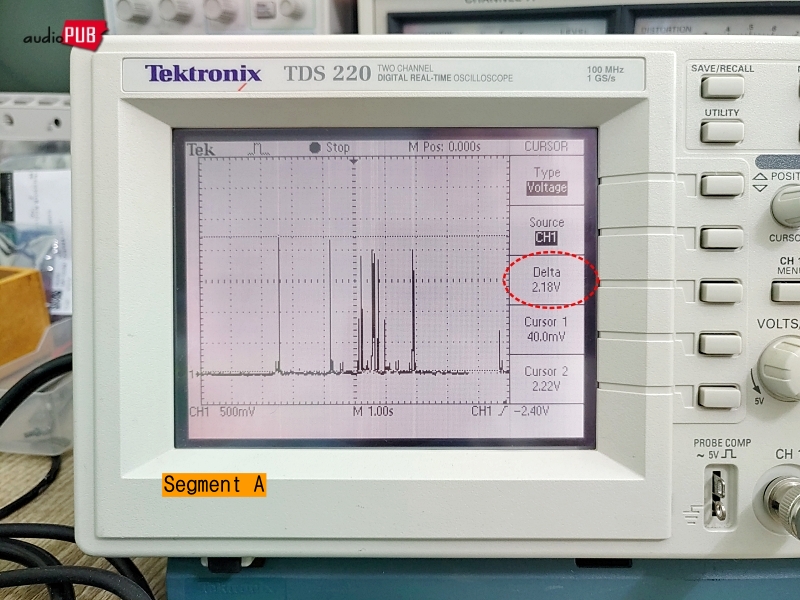
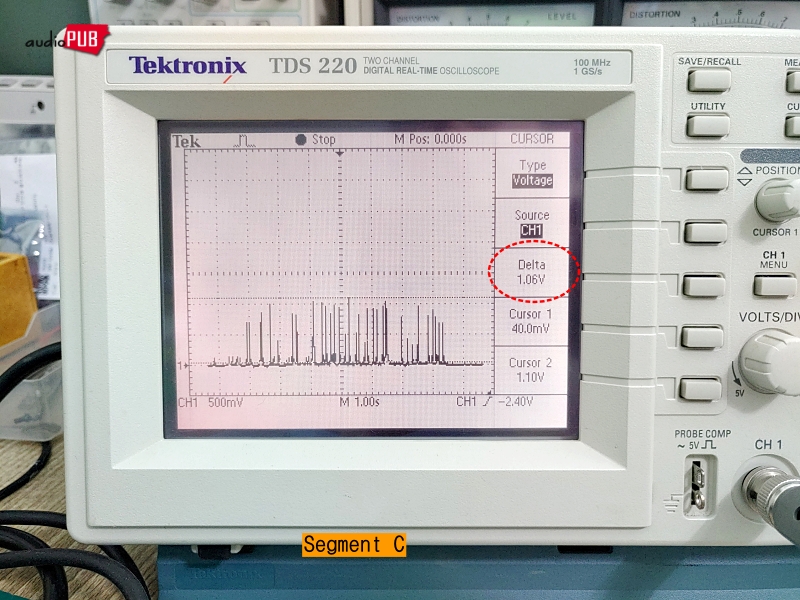
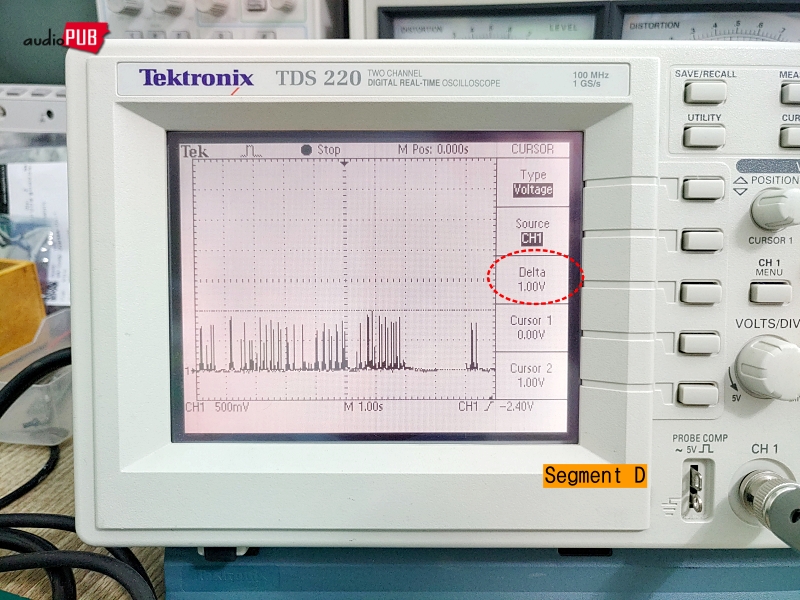
2) 세그먼트 센서 C와 D : 어떻게 해도 1V 수준이다.
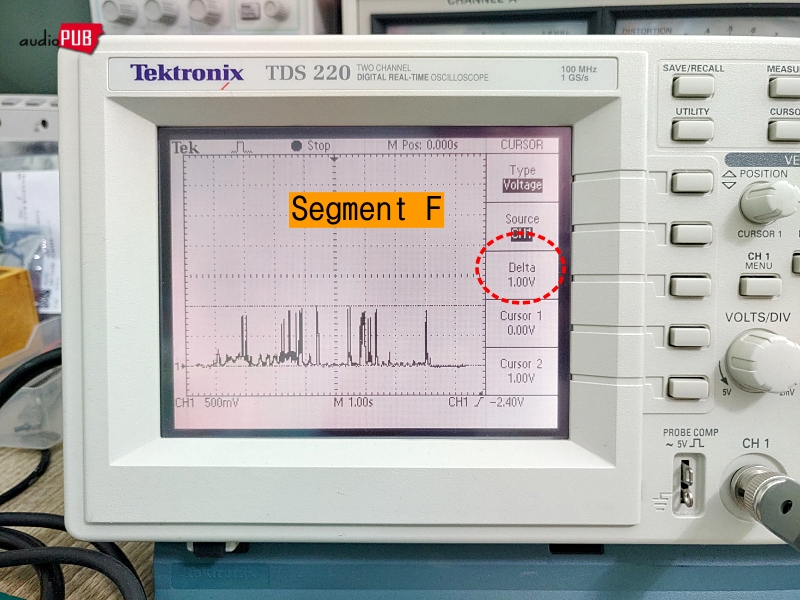
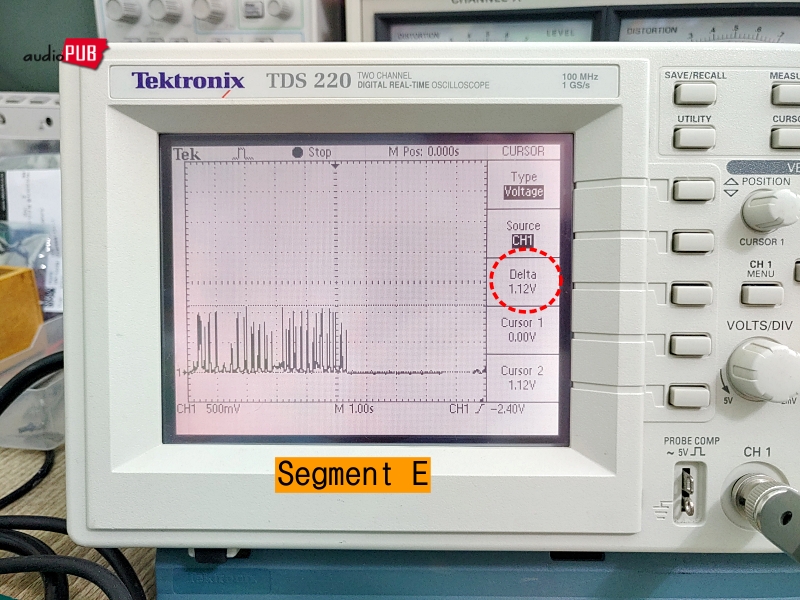
3) 세그먼트 센서 F와 E : 트랙 이탈을 감지하는 용도. 어떻게 해도 1V 수준이다.
이상의 값을 가지고 물리 센서의 집광 상태를 추정해 보면,
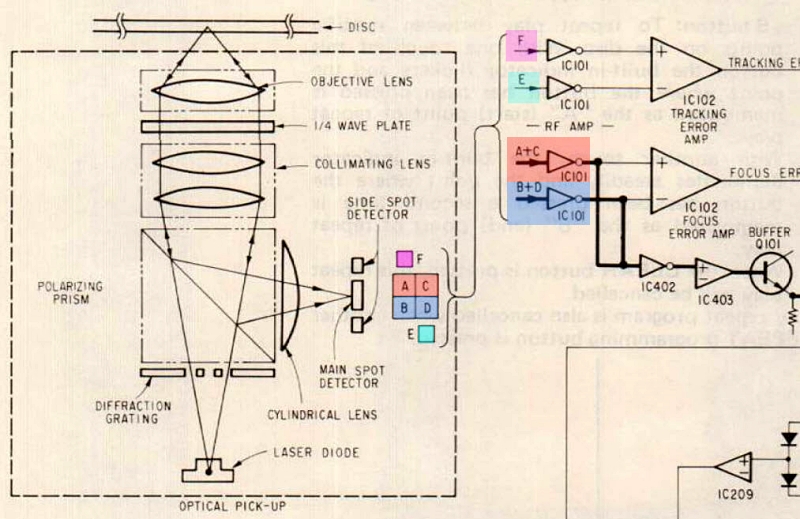
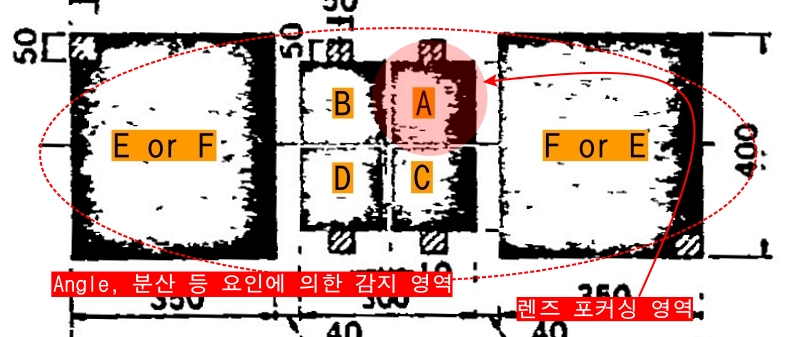
(▲ 렌즈 현재 위치를 기준으로 레이저 광은 세그먼트 센서 A에 포커싱되어 있다. 그럼에도 불구하고, PIN 다이오드의 확산각, 프리즘 작용, 내부 렌즈의 작용, 기타의 물리 변수에 의해서 A~F까지 모두 감광할 수 있음)
이상에서,
1) 픽업 모듈 렌즈가 가만히… 현재 픽업 모듈을 90도 꺾어 놓았고 지구 중력에 의해 어떤 위치를 잡고 있다는 사실이 중요함. “한 놈만 걸려라” 전술에 있어서는… A가 충분히 큰 값이므로 OK! 간주.
2) 전원 투입 후 Focus 및 Tracking 보정 회로의 작용에 의해서 렌즈가 미세하게 부유할 것이다. 어떤 기본 위치를 잡을지는 알 수 없음. 전원이 없는 현재 상태와 전원이 들어간 후의 디폴트 상태가 사뭇 다를 것으로 예상하고…
더 이상 만져봐야 의미가 없다.
브라켓 등을 고정하고 다시 설치하고 도저히 반응이 없으면, 캘리브레이션 작업을 다시 하면 된다. 뭐…까짓!
(시간 흐른 후)
브라켓 고정 나사를 조심스럽게 조인 후 A~F 센서의 Peak를 측정해 보면, 조임 과정에서 살짝 틀어진 것을 알 수 있다. 충분히 이해됨.
A = 2.18V → 1.78V, B = 1.98V → 1.38V, C = 1.06V → 2.14V(=정지된 렌즈의 포커스가 이동함), D = 1.0V → 1.46V, F = 1.0V → 0.88V, E = 1.12V → 1.02V
그럼에도…
현재, CDP 입력 임피던스보다 훨씬 낮을 것으로 예상하는 8K 오움 부하에서 관찰 중이고, 무엇보다 A~F가 집단 반응을 하고 있다는 사실이 중요하다. 전원 투입 후 포커스 및 트래킹 보정 회로의 동작에 의해 어떤 긍정적인 반응이 있을 것이다.
참고로, 최소값인 세그먼트 F 센서의 0.88V 그리고 최대값인 세그먼트 C 센서의 2.14V는 다음과 같이 해석할 수 있음.
0.88V ÷ 8K 오움 = 0.00011A = 11uA, 2.14 ÷ 8K = 0.00027 = 27uA. 얼렁뚱땅으로 최소 10uA가 출력된다.
■ 수직 방향 픽업 모듈의 반응
설치 시 렌즈는 위쪽을 바라보게 된다. 중력, 전원 ON, 전원 OFF 시 반응이 각기 다를 것이다. 그래서 수직 방향 값을 살펴보면… 역시, 부유하도록 되어 있는 렌즈 구조물의 3D 변위가 미세한 영향을 주고 있다.
A = 2.18V → 1.78V → 1.66V = 최종 결과는 Down
B = 1.98V → 1.38V → 1.40V = 최종 결과는 Down
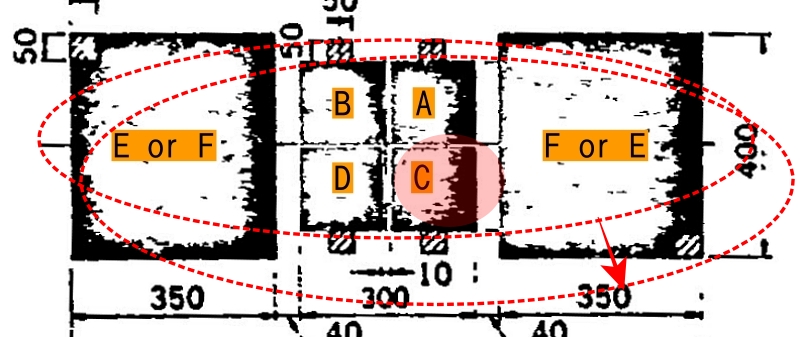
C = 1.06V → 2.14V → 2.06V = 최종 결과는 Up
D = 1.0V → 1.46V → 1.18V = 최종 결과는 Up
F = 1.0V → 0.88V → 0.80V = 최종 결과는 Down
E = 1.12V → 1.02V → 1.26V = 최종 결과는 Up
F/E는 경계선 넘어가는 것이니 Pass. A~D는 1V 이상이므로… TO GO!
(시간 흐른 후)
레일 등을 구조물을 가볍게 조립하고… 전원 투입! 이제는 무조건 회전함. 휴~! 이제 고비가 넘어갔다.
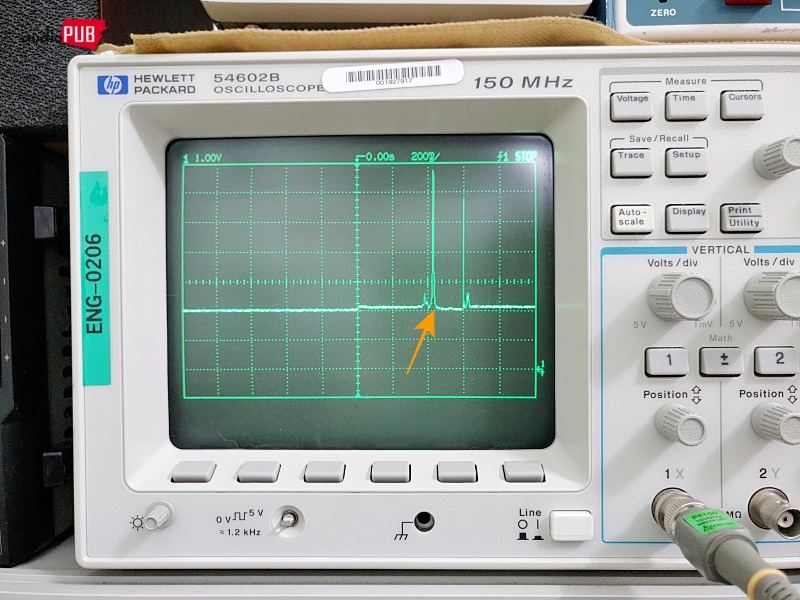
(▲ 내용 추가, 원래는 <RF 보드> 출력 파형이 연속 겹치기로 보여야 하는데… 어쨌든, CD의 단발성 읽기를 했으니까 스핀들 모터가 회전한 것)
가변저항을 돌릴 곳이 많다. 심적 부담이 전혀 없는, 본격적인 조정 작업은… 다음 글에서 계속.
* 관련 글 : 금성사 GCD-606 CDP 탐구하기 (24), 조정 시도 그리고 처킹 모터 오류

")
