글쓴이 : SOONDORI
당황스러웠던 스핀들 회전 오류에서 시작된… 끙끙거림. 덕분에 SONY CDP의 회로도가 병풍처럼 머릿속에 쫙~! 그리고 그들의 기본 설계 사상에 대해서 많은 것을 이해하게 되었다.
* 관련 글 : 금성사 GCD-606 CDP 탐구하기 (25), 처킹 모터 재장착 후 조정 작업
현재는 얼렁뚱땅 상태의 아날로그 제어와 그 아날로그 제어가 맞다고 착각하는 디지털 제어에 의해서, CD를 넣고 돌리는 기본 동작이 적당히 처리되는 상태이다.
■ 불확정 변수 가변저항 4개
전체 튠업을 진행하기 위해서는, 남아 있는 아날로그 제어 변수를 확정해야 한다.
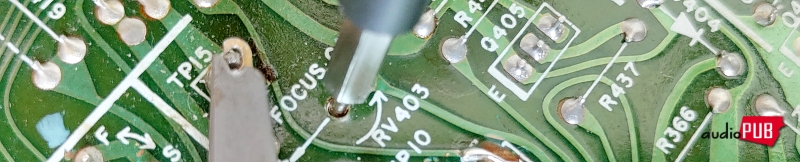
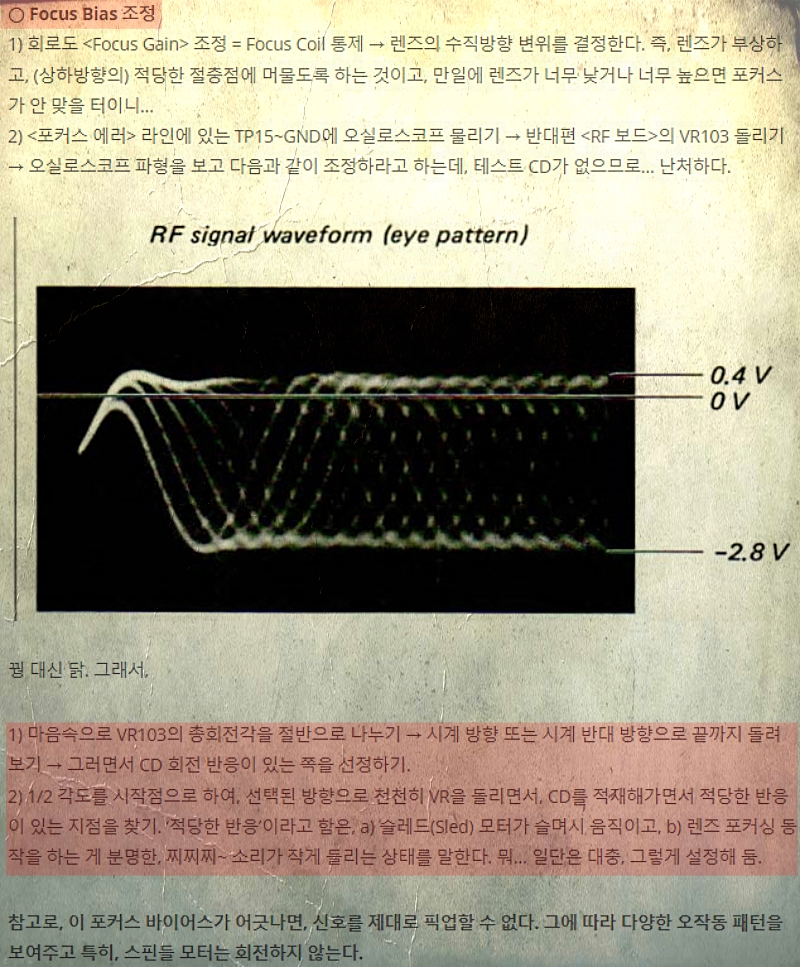
● 신품 교환된 VR403, Focus Gain
1) SONY 지침 : 수평 유지 → TP15~GND에 오실로스코프 프로브 연결 → VR403 돌림 → 1V 레벨로 설정.
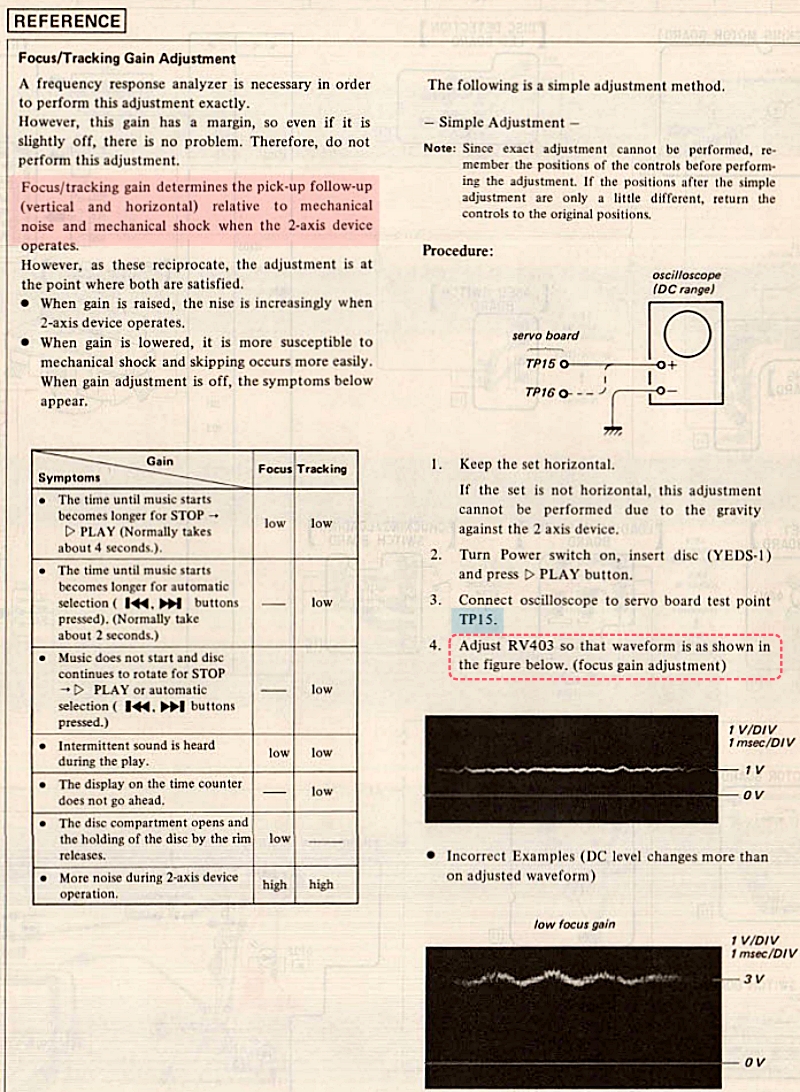
2) 실제 작업 : 쉽사리 파형을 1V으로 설정함. OK!
● 신품으로 교환된 VR404, Tracking Gain
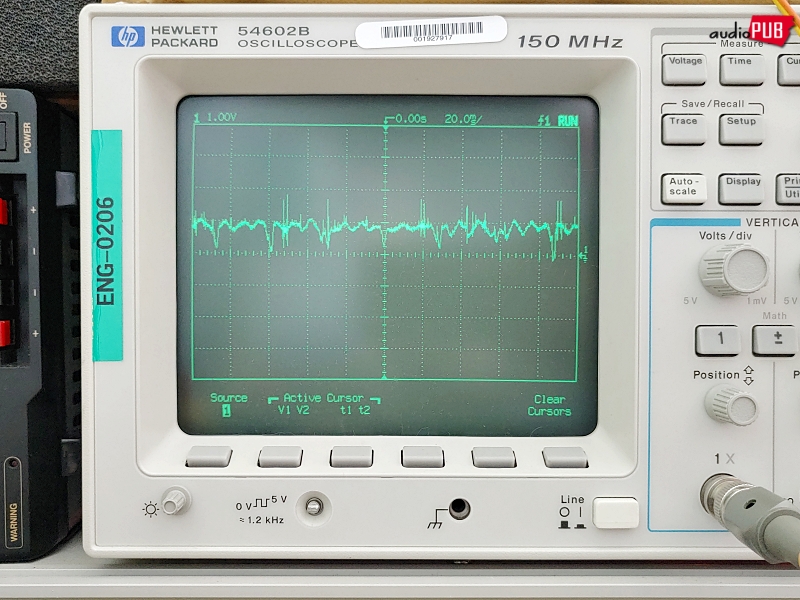
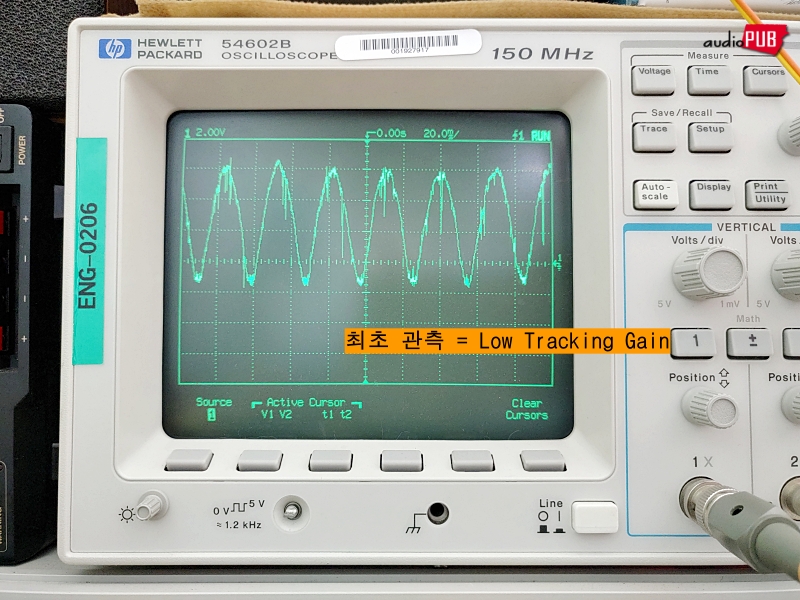
1) SONY 지침 : 수평 유지 → TP16~GND에 오실로스코프 연결 → VR403 돌림 → 아래 제시된 표준 파형의 형태로 조정. 그러니까 0V점 주변에서 약간의 등락이 보이는 정도로…
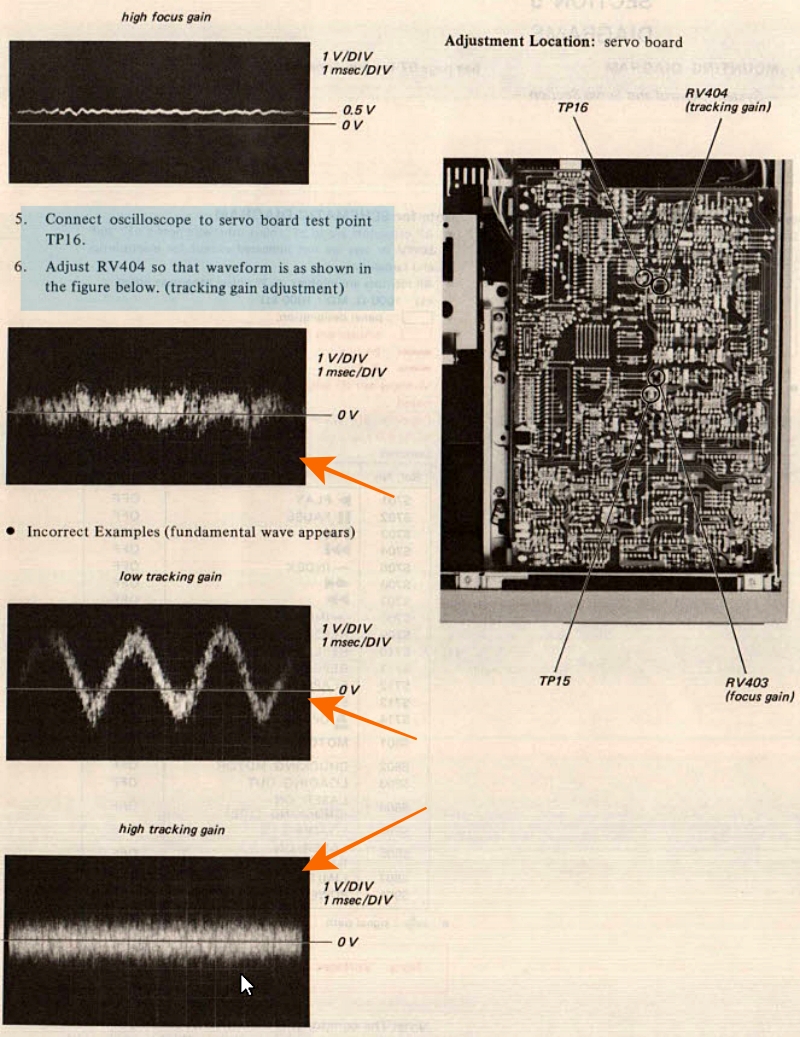
2) 실제 작업 : 트래킹 코일의 반응 음이 들리고, 파형도 크게 흔들리는 조건이다. Low Tracking Gain에 해당함 → 가장 좋은 조건으로 만들도 0V선에 머물지 않는다. +3V가량의 편차 확인 → 트래킹 제어에 근본적인 문제가 있다는 뜻? 일단 Pass.

(시간 흐른 후)
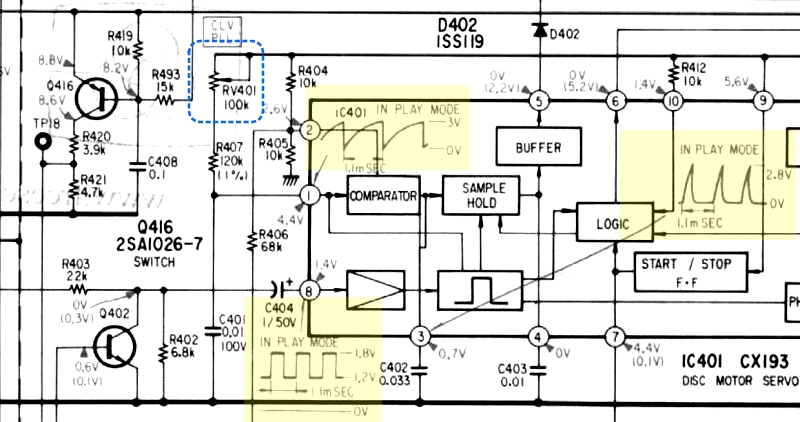
● 구 품이지만, 돌림 각도가 달라진 VR401, CLV PLL
1) 소니가 아무렇게나 정한 정의, CLV = Output to operate the disc motor servo circuit. 스핀들 모터 동작에 관한 것.
2) SONY 지침 : 조정 모드를 유지하되 VR103은 통상의 운용 상태인 Lock 방향으로 돌려놓기 → TP9~GND에 오실로스코프 물림 → 테스트 CD 재생 → VR401 돌리기 → 10uS 방형파 전위 확인.
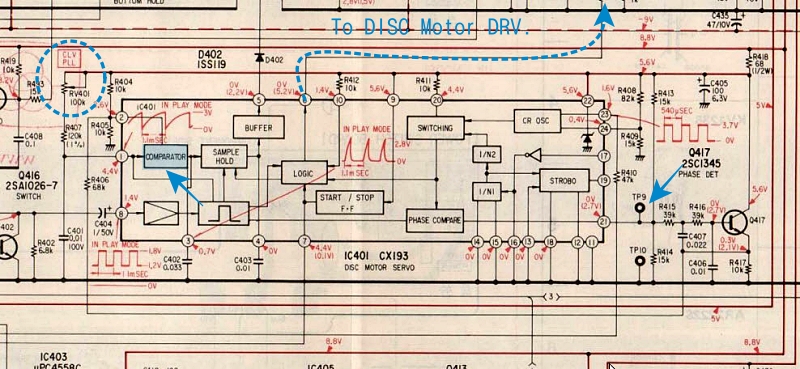
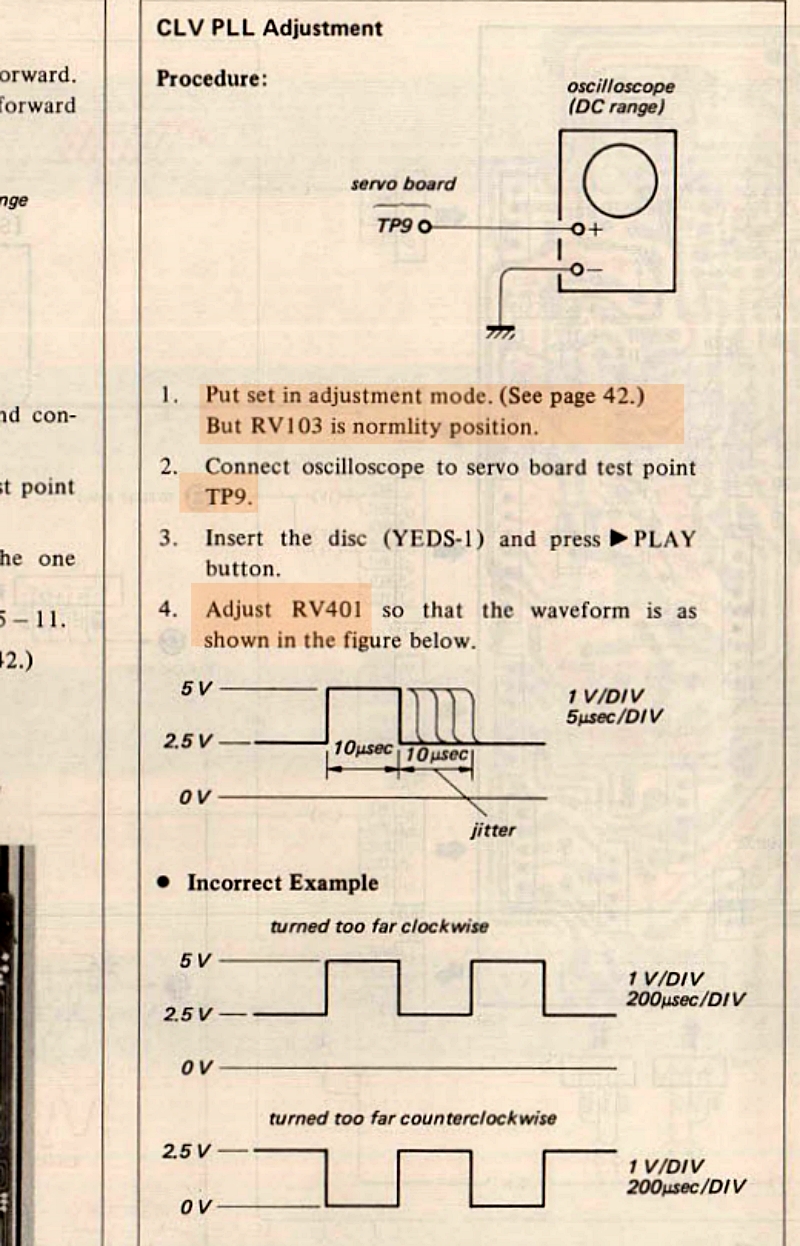
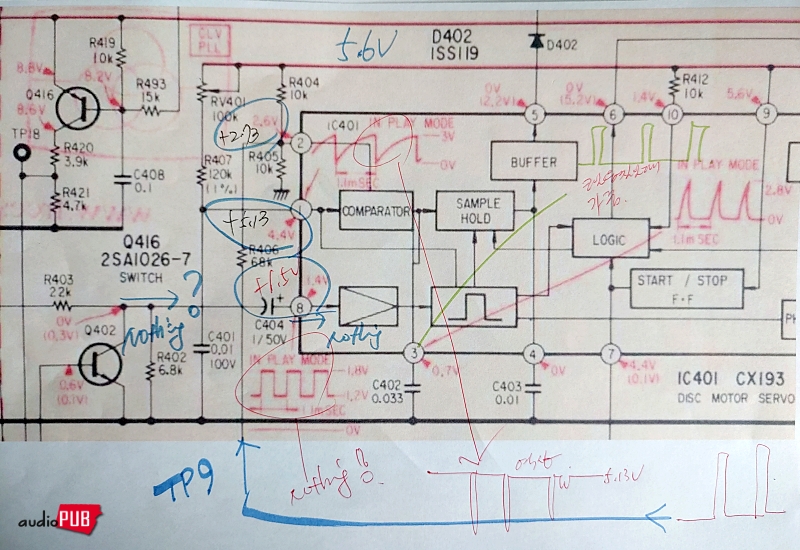
3) 실제 작업 : 테스트 CD가 없으니까, 모두 다 무시하고, 아래 기표 내용에 최대한 근접하는 조건으로 VR401 돌리기.
그런데, 유의미한 그리고 규칙성 있는 반응이 없다? 앞서, 트레킹 제어에 문제가 있다고 판단했는데, 그것에 의한 여파가 아닐까 싶음.
(시간 흐른 후)
● 구 품이지만, 돌림 각도가 달라진 VR402, RF PLL
1) RF PLL : 획득 아날로그 펄스에 연동된다. Data와 Clock을 출력한다는 것은, 디지털 처리의 기준점을 제공한다는 뜻이다.
2) SONY 지침 : 아날로그와 디지털 경계점에 있기 때문에 절차가 복잡함. 게다가 발진코일(T201)의 조정까지 포함하고 있음.
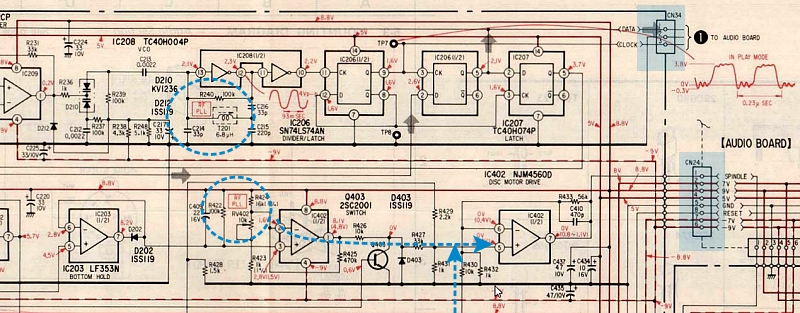
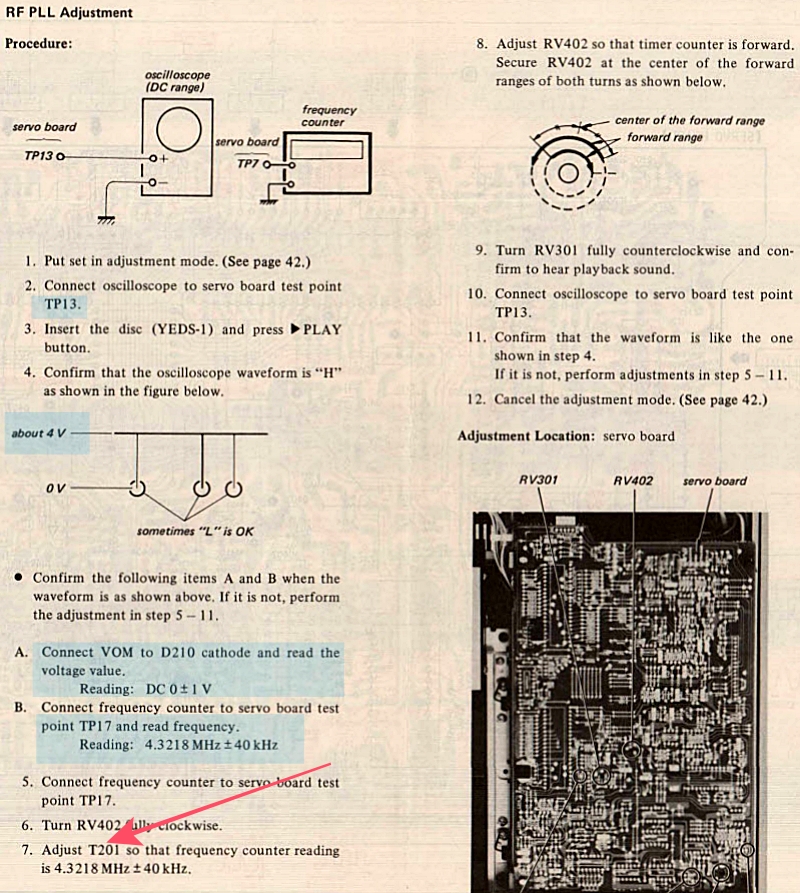
2) 실제 작업 : 전 단계의 것들이 확실하지 않기 때문에 잠시 작업을 중단하고… 아무래도 특단의, 그러면서 전혀 다른 방법론이 필요하다.
(시간 흐른 후)
■ 다른 각도의 튠업
테스트 CD도 없고, 단계별 기준점도 없으니… 생각을 바꿔서 회로도에 표기된, a) STOP 상태의 포인트 전압, b) PLAY 상태의 포인트 전압과 제시 파형을 중심으로 조정하기로 함.
○ <RF 보드> 조정 작업
전 차수에서 지침대로 VR103(=Focus Error Offset)을 돌렸는데, STOP 상태 전압이 +1.18이다. “에라이~! 뭐가 이래?” → 멀티미터를 보고 0.9V로. 나머지는 제시값 충족.
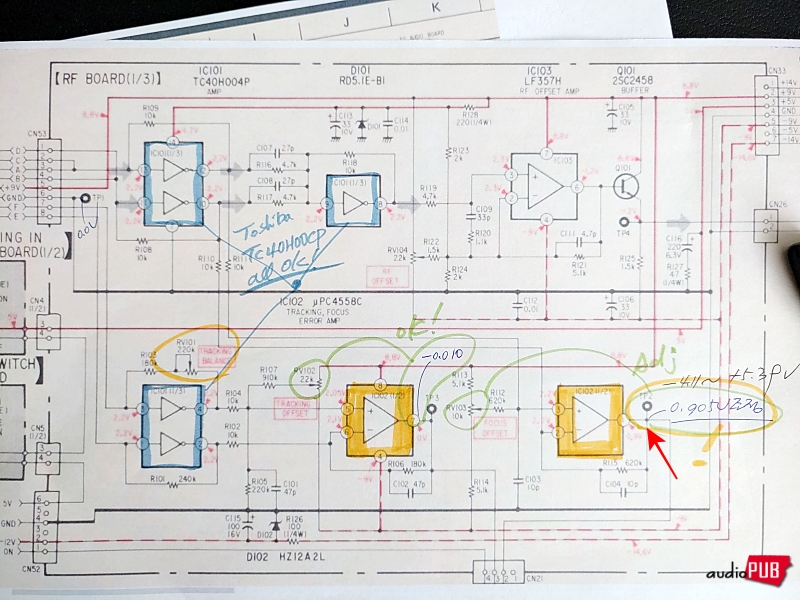
참고로 TP2/Focus Offset에 대한 직전 작업 내용은 다음과 같고… 약 0.2V오차이니까, 그래도 엇비슷하게 맞춘 셈.
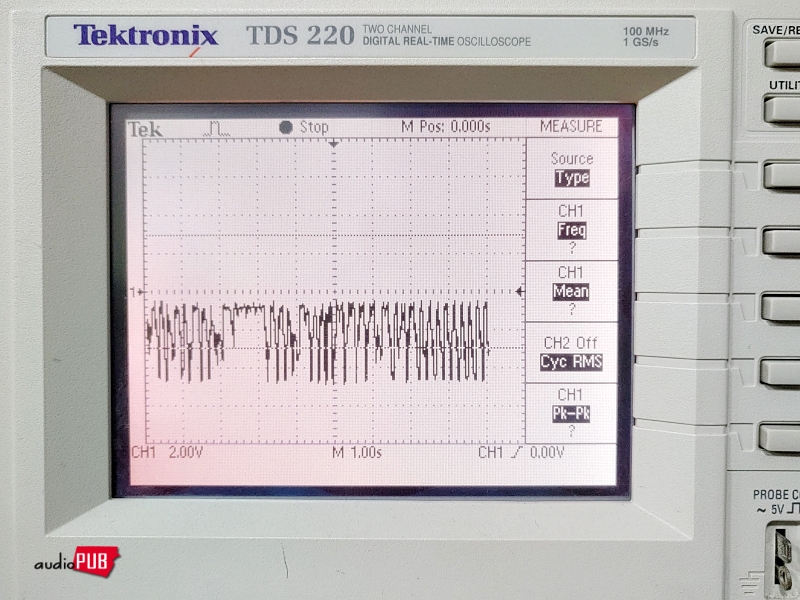
노래 CD를 재생할 때의 <RF 보드> 출력은 다음과 같다.
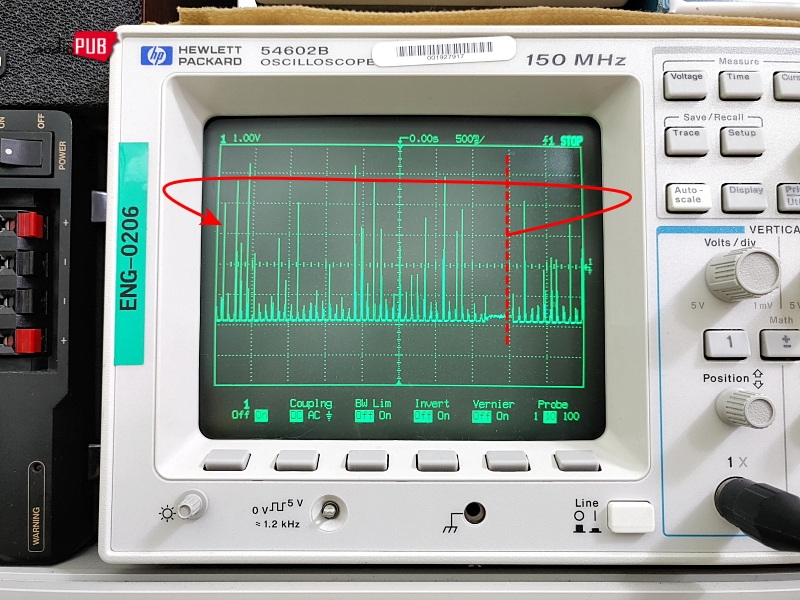
1) CDP가 무엇을 시도하고 있음.
2) 강도를 보면 그리고 강도 조정이 가능하다는 점을 생각하면… 픽업 모듈 노화 즉, LD 노화는 아닐 것 같다. 여전히 그런 생각.
3) 읽은 펄스가 들쑥날쑥한 것은 Focus와 Tracking이 제대로 맞지 않았기 때문인데… 그것은 <RF 보드> 이후의 회로 동작이 불완전하기 때문으로 추정함.
그렇다 치고… RF Offset을 결정하는 VR104의 상태 그리고 TP4의 전위 값은 얼마일까? → 규정치 그대로. TP4의 파형을 다음과 같다. 앞서 관측한 것의 Zoom-In 버전이다.
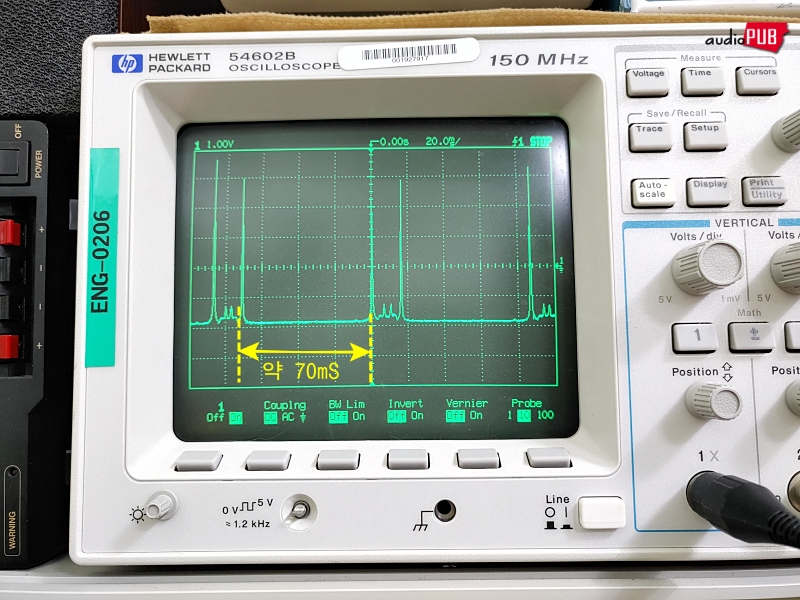
파형 패턴의 반복.
규칙적인 파형 또는 펄스의 패턴이 CDP가 무엇을 위해 Retry 하는 패턴인 것처럼 보인다. 이게… 아무래도, 트래킹 제어에 문제가 있는 듯.
(시간 흐른 후)
전체 시스템이 폐루프이므로, 논리적으로 중간을 끊어서 생각해 보기.
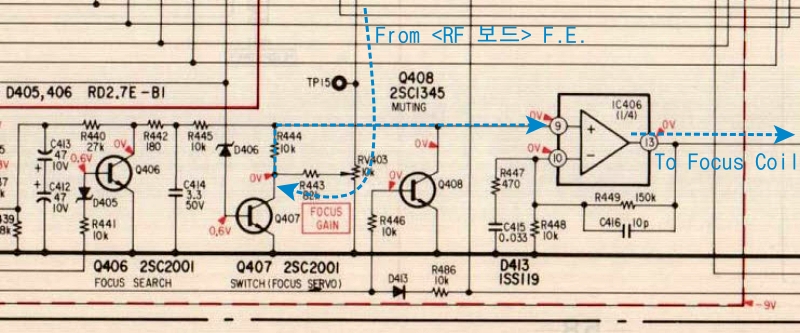
1) 픽업 → A/B/C/D는 PIT의 정보 신호, E/F는 트랙을 벗어날 때 획득되는 신호 → 모두 <RF 보드>에서 처리된다 → 앞선 조정에서 완결된 것으로 간주.
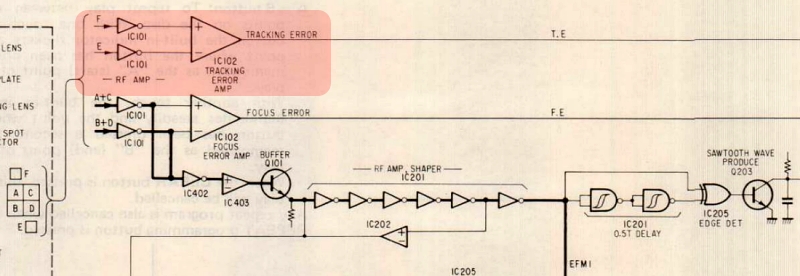
2) 시스템은 T.E. F.E를 받아서 → 전자부동식 포커스 에러 보정 + 트래킹 에러 보정 처리 → 그렇게 보정이 되는 조건에서 다음 트랙을 읽기 위해서 그러니까 동심원에 추종하기 위해서 슬레드(Sled) 모터가 천천히 돌아야 함 → 그러기 위해서는 트랙을 이동시키는 또는 큼직하게 트랙 오차를 보정하는 회로가, 슬레드 모터로 명명된 DC 모터를 구동해야 한다.
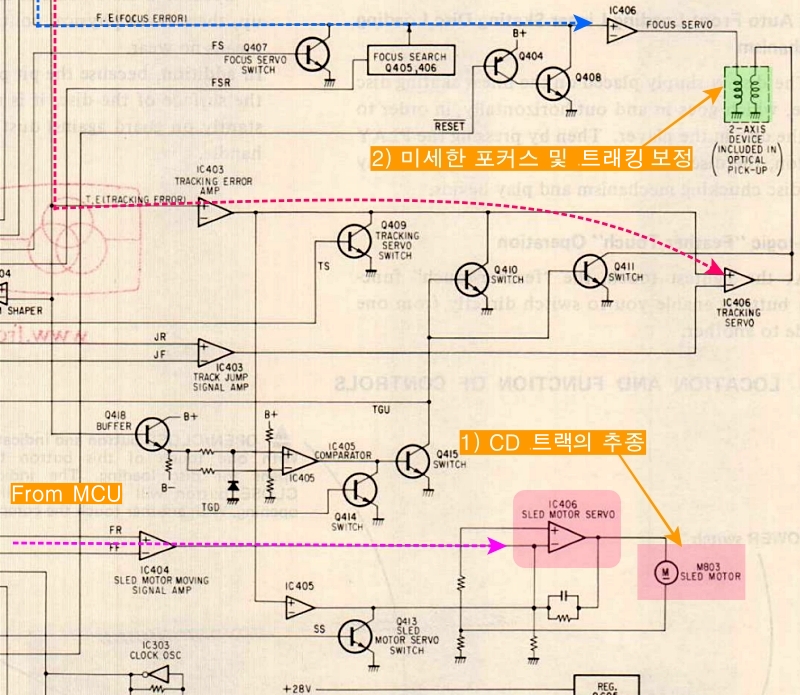
모터가 제대로 도는 것 같지 않고, 더하여 FF/Prev. 버튼을 누르거나 곡 번호를 시정하면 픽업모듈이 슬그머니 이동을 해야 하는데, 적절한 반응도 없음. 그러면, <굵직한 트랙 추종성>이 매우 나빠진 상태로 보고…
(시간 흐른 후)
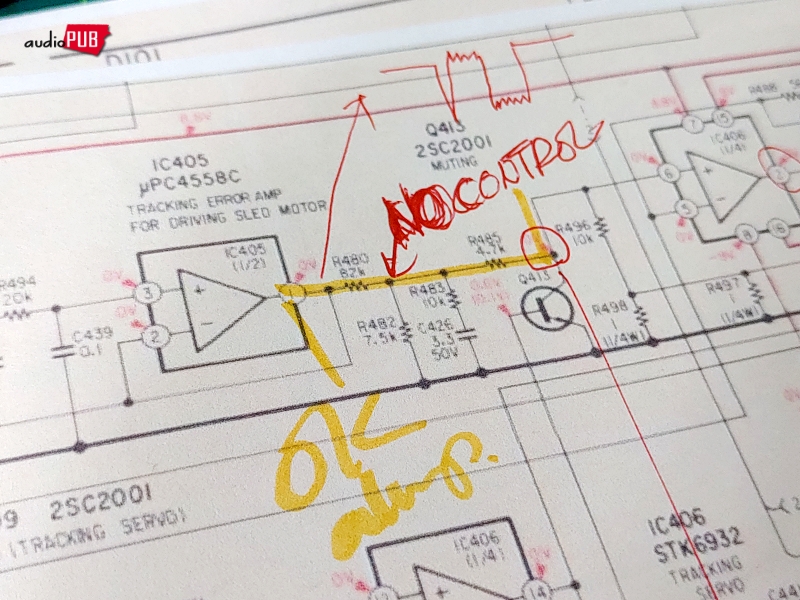
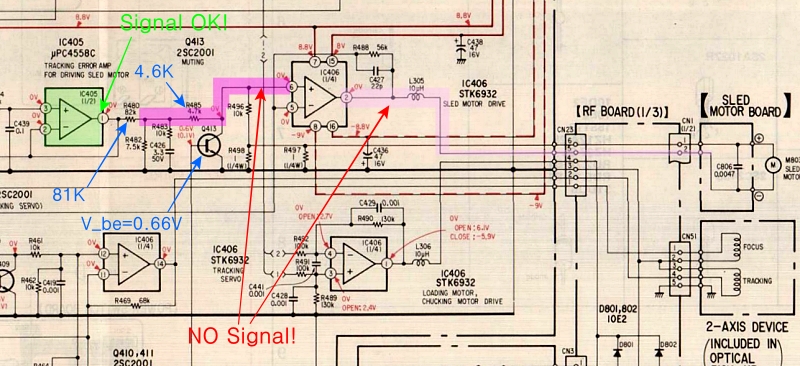
포인트 A에서 트래킹 제어 파형 관측 됨. R480 건너편의 포인트 B와 그것에 패턴이 연결된 포인트 C는… 잠잠하다.

“동네 슈퍼에 가서 주시후레시 껌 좀 사오라고 시켰더니… 이노마가 옆길로 새서 뭘 하고 있었던?”
이러니 <굵직한 트래킹> 제어가 잘 안 되고… CDP 제어계가 미세 포커스 + 미세 트레킹만으로 뭘 해보려다가, 반복 패턴의 제어 파형만 제시하게 된 것이다.
처킹 모터 브러시 오류 사례와 같은, 황당하되 간단한 부품 오류가 있을 것이라는 기대하에… 예를 들러, Q413 ON 상태는 FM Mute처럼 트래킹 보정용 슬레드 모터 신호를 삭제함. 근본 이유가 따로 있을 것.
다음 글에서 계속.
* 관련 글 : 금성사 GCD-606 CDP 탐구하기 (27), Sled Motor와 Tacking Error 그리고 CD-DA 레드북 규격

, 앰프 부와 튜너 부와 데크 부의 관리 작업")
, 양 전원 오류 검토")
CDP를 직접 오버홀하고 조정하는 일은 매우 어려운 고난의 길, 기술력이 부럽습니다.
CDP 픽업과 모터 등의 제어 방법을 모르니 기계적 메카니즘 장애 생기면, 요즘은 수리 맡길 곳도 거의 없어서 방치하게 됩니다.
결혼 때 사서 30년 넘게 소유한 마란쯔 CD-50, 필립스에 상표만 마란쯔입니다.
10년 전쯤, 트랙 에러가 빈번하게 시간이 지나면서 더 심해집니다.
이베이에 똑 같은 중고 픽업을 구입해서 교체해도 마찬가지, 픽업 문제가 아니었습니다.
예상 문제는 전해콘일 가능성에 전원부와 CDP제어부의 2/3 정도를 리캡핑 후에.. 정상으로 돌라옵니다.
조정용 CD가 없어서 전압 조정과 가변저항의 범위만 조정하였습니다.
6~7년 정도 잘 사용했는데 똑같은 증상이 재현됩니다.
다시 리캐핑 하려니 엄두가 안 납니다.
요즘은 애플뮤직 스트리밍도 고음질이고 웬만한 음원은 거의 청음이 가능해 CD의 필요성이 점점 희미해져 게으름만 피웁니다.
서비스매뉴얼에서 언급하는 조정용 CD는 구할 수 있는 확률이 거의 0%입니다.