글쓴이 : SOONDORI
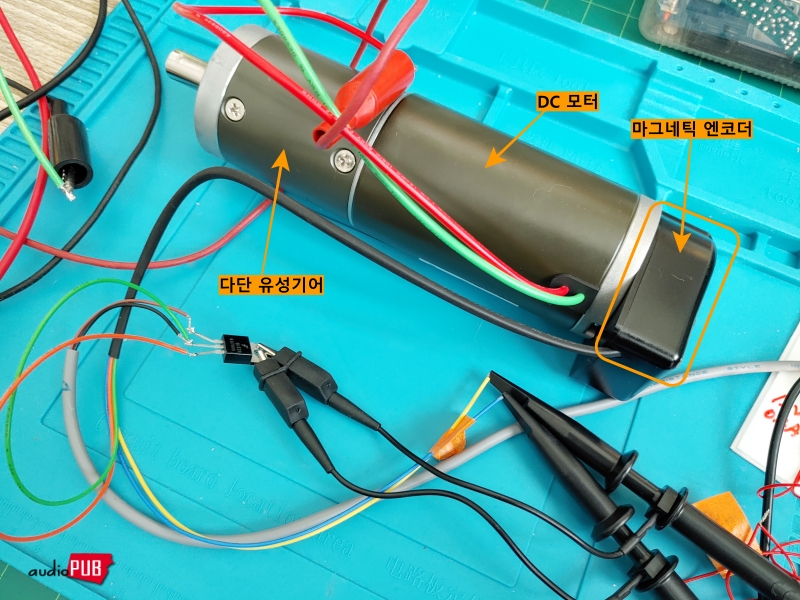
자석과 자화 코일의 반발력으로 회전하는 모터의 뒤쪽에, 다양한 아이디어의 회전수 검출용 로터리 엔코더를 붙이는데… 그중에서, 내오염성 등 몇 가지 장점을 우선하는 자석식 엔코더가 사용되고 있다.
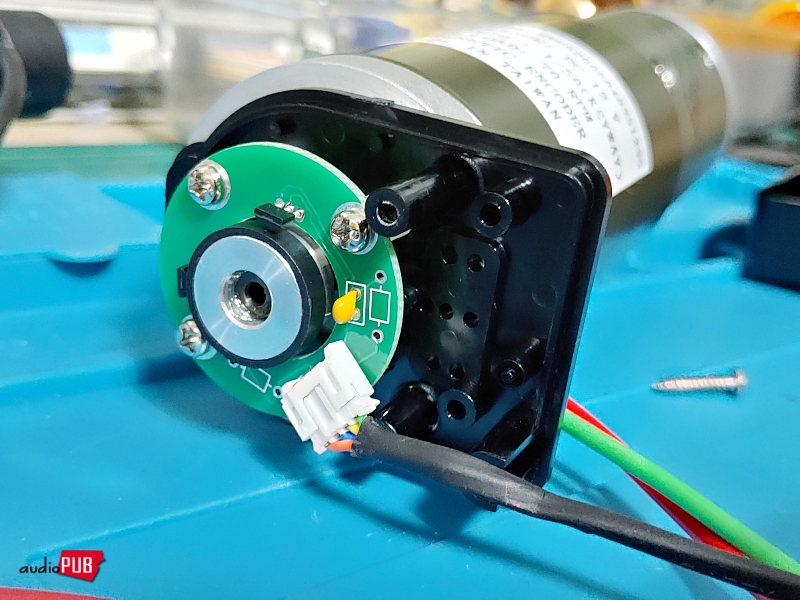
통칭하기를, <샤프트-엔드(Shaft-End) 타입>. 대부분 분리 가능함.
* 관련 글 : 자석에 재미가 있다 (9), 네오디뮴 N35와 N52와 사마리움과 페라이트
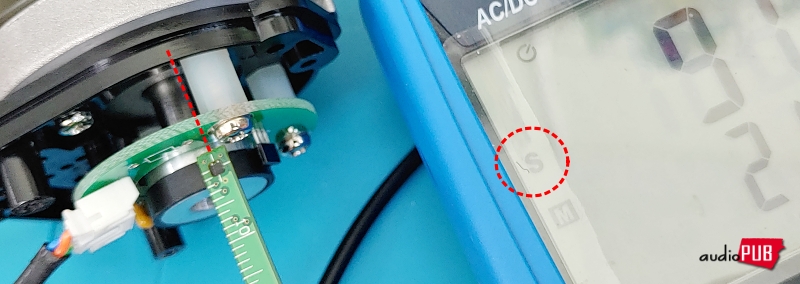
<샤프트-엔드(Shaft-End) 타입>이라고 부르는 이유는 아래와 같은 구조 때문에. 이런 구조의 모듈을 붙이면, 당연히 +1원을 더 받는다.
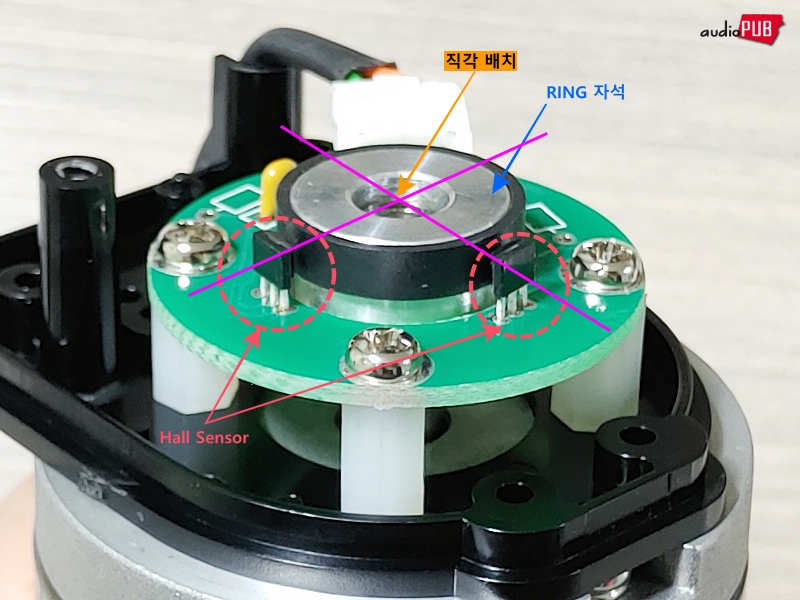
구조는… 수평면을 기준으로, N극과 S극이 배치된 링-자석을 두고 주변에 홀센서(Hall Sensor)나 자기저항센서(Magneto-Resistive Sensor, MR 센서)를 배치한다. 배치 조건은 정확히 90도 차이를 유지하기. (물론, 현실 세상에서 절대로 그렇게 될 일은 없음. 그냥… 대충 90도?)
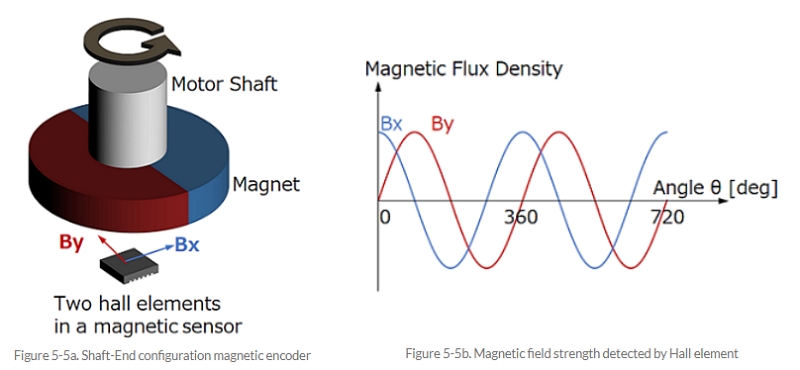
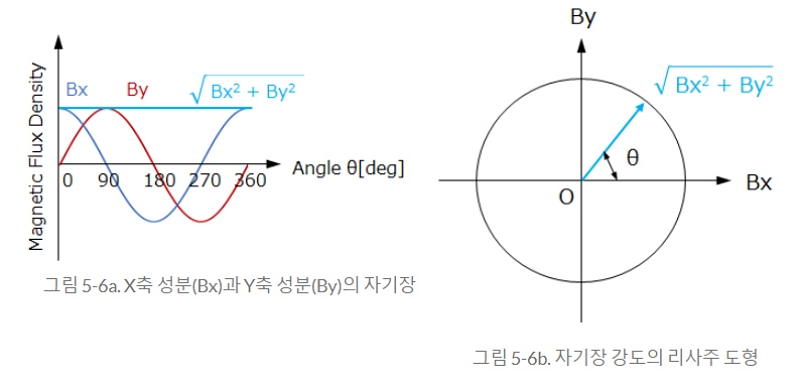
(▲ 흔히 Sens_A, Sens_B로 표현하는 시장 내 제품의 두 개 센싱 출력에 대하여… 1) 벡터 합성 각속도 계산 논리에 따라가면, Z^2 = B_x^2 + B_y^2. 각속도 Z = Root(B_x^2 + B_y^2). 그러므로, RPM = (각속도 * 60) ÷ (2 × π). 이상 출처 : https://www.akm.com/global/en/products/rotation-angle-sensor/tutorial/magnetic-encoder/)
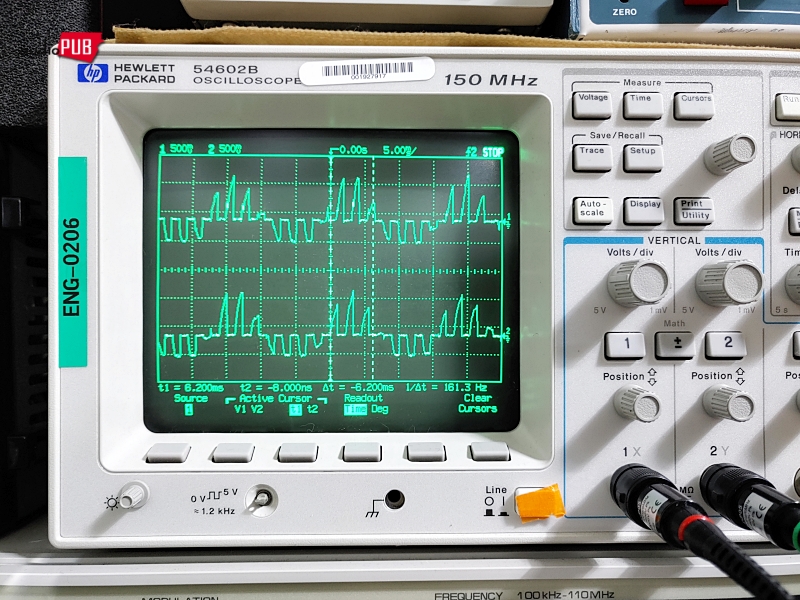
모터 축이 돌면, 링 자석이 회전하고 고정된 위치의 두 개 홀 센서가 N극 또는 S극을 감지한다. 서서히 다가왔다가 서서히 멀어지기 때문에 한 개 홀 센서의 출력은 싸인파와 같게 됨. 그리고 위상은 90도 차이가 나게 될 것.
두 센싱 출력에 위상차가 있다는 것은, 회전 방향을 알 수 있다는 뜻이다. 그러면, 마그네틱 엔코더 하나 달자마자 모터의 현재 RPM도 알고, 모터 회전 방향도 알고… 1) 두 센싱 신호를 제어보드 입력으로 넣고, PID 제어 등 여하한 방법으로 목표 RPM 대 현재 RPM을 관리하고, 2) DC 극성을 바궈서 정회전/역회전을 결정하면 됨.
끝?
자석으로 전기 에너지를 얻고, 자석으로 물리적인 구동력을 만들고, 자석으로 어떤 장치가 잘 돌아가는지도 확인하고… “실로, 지남철 자석은 천하 만능이로다!”
* 관련 글 : 자석에 재미가 있다 (11), 인덕터 전자석
(내용 추가) 링 마그넷은, N-S-N-S… 그런 식으로 복합 극성 구조를 취한다. 그래서 여러 개 펄스가 보이는 것.

, 동조 이탈 점멸 그리고 마무리")
")
